NASA To Land Ice Mining Robot On Moon In First Ever Attempt To Extract Resources
NASA has announced that next year it will deliver an ice-mining machine connected to a robotic lander to the Moon in the first-ever attempt to find and extract resources from the lunar surface.
According to NASA, the development of space-mining technology will be critical in establishing a robust and long-term presence in deep space.
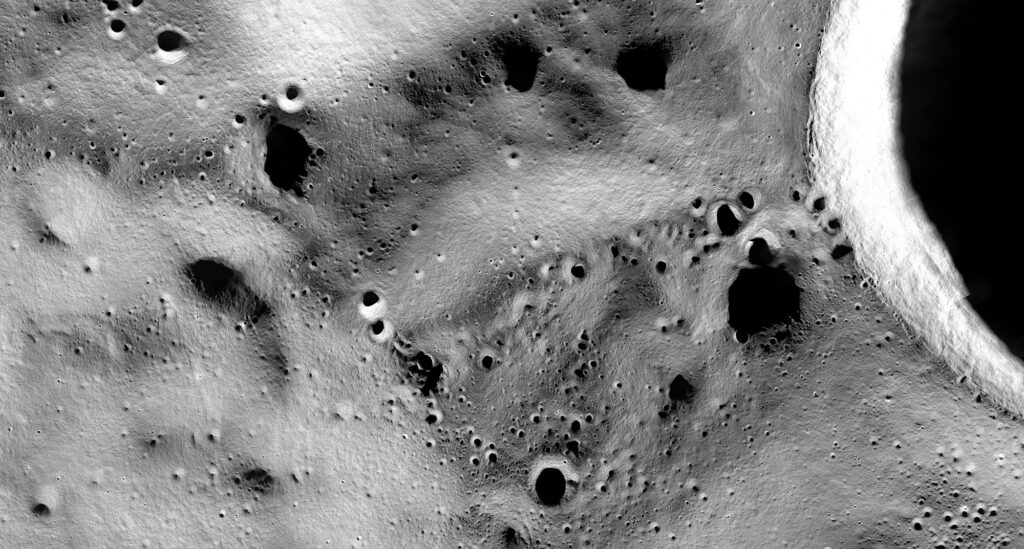
NASA gave details on the mission that will see the mining robot spend 10 days near the Shackleton crater in a statement released yesterday (Wednesday 3rd November).
The location for the mission was chosen after months of analysis by a spacecraft currently circling the Moon.
The location near the Shackleton crater receives a lot of sunlight which will help power the robot. It also has line of sight with Earth, which means the machine will be in constant communication with its operators.
The device set to take off from Earth and head towards the Moon is made up of three major components.
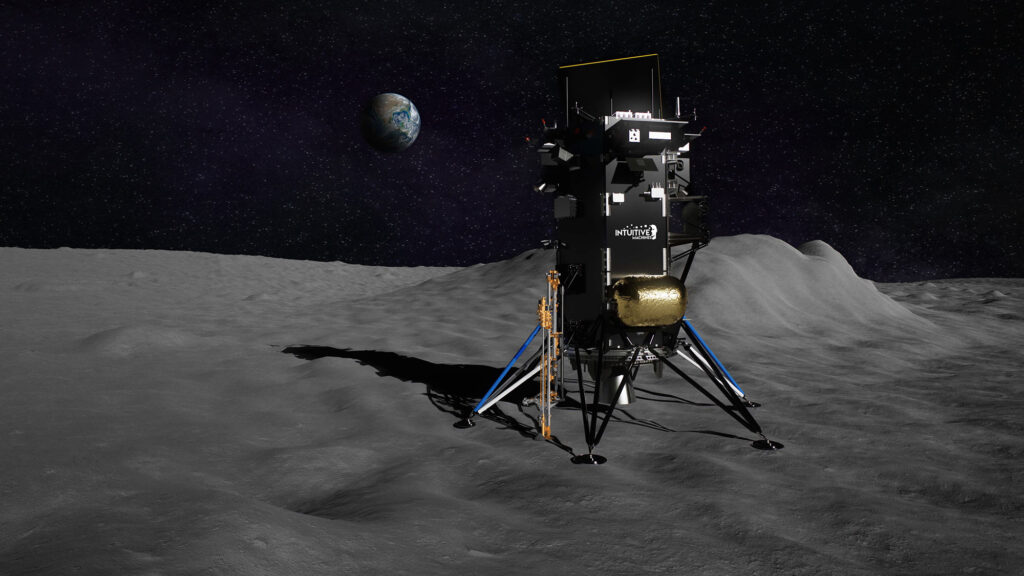
The statement lists the components as: “The NASA-funded Polar Resources Ice-Mining Experiment-1 (PRIME-1) – which consists of a drill paired with a mass spectrometer – a 4G/LTE communications network developed by Nokia of America Corporation, and Micro-Nova, a deployable hopper robot developed by Intuitive Machines.”
Dr Jackie Quinn, PRIME-1 project manager at NASA’s Kennedy Space Center in Florida, said: “PRIME-1 is permanently attached to Intuitive Machines’ Nova-C lander, and finding a landing location where we might discover ice within three feet of the surface was challenging.
“While there is plenty of sunlight to power the payloads, the surface gets too warm to sustain ice within reach of the PRIME-1 drill. We needed to find a ‘goldilocks’ site that gets just enough sunlight to meet mission requirements while also being a safe place to land with good Earth communications.”
After it lands, the PRIME-1 drill, dubbed ‘The Regolith Ice Drill for Exploring New Terrain’ (TRIDENT), will try to drill to a depth of three feet into the lunar surface.
It will then remove lunar soil, also known as ‘regolith’, and study it for the presence of water.
While the mining operation is under way, the Mass Spectrometer (MSolo), will study the volatile gases given off by the regolith brought to the surface by TRIDENT.
By drilling on the surface of the Moon, NASA is hoping to gain valuable experience in devising long-term deep space operations, which will depend on astronauts being able to mine for ice and other elements on distant planets.
PRIME-1 will be tasked with investigating the material below the Moon’s surface while Nokia will test its 4G/LTE network.
Nokia’s network will be tested by a diminutive rover made by Lunar Outpost which will venture across the lunar surface, putting over a mile between itself and the Nova-C lander before testing the signal.
Nokia’s network will be developed so that machines on the surface of the moon can communicate with each other over long distances during lunar missions.
The network is expected to be very powerful, even allowing HD video streaming between astronauts, base stations and vehicles.
While Nokia is testing its network and TRIDENT is mining for ice, Micro-Nova will be sent into a close-by crater to take pictures and gather scientific data.
Micro-Nova will send the images back to the Nova-C, before they are analysed and used to facilitate future lunar exploration missions.
Niki Werkheiser, director of technology maturation for NASA’s Space Technology Mission Directorate (STMD), said: “These early technology demonstrations employ innovative partnerships to provide valuable information about operating on and exploring the lunar surface.
“The data will inform the designs for future in-situ resource utilization, mobility, communication, power, and dust mitigation capabilities.”


