Leeds University Experts Use Virtual Reality To Teach Self Driving Cars Not To Run Over Pedestrians
A research team led by the University of Leeds is working on making self-driving cars safer by teaching them about how pedestrians think using Virtual Reality technology.
As self-driving cars go from science fiction to an everyday reality concerns about the danger they pose to pedestrians has been getting more attention following several high-profile collisions.
One incident saw a cyclist in Arizona killed by a self-driving Uber, while at the 2020 Tokyo Olympic games a self-driving minibus ran over a disabled pedestrian.
A team of researchers led by experts from the University of Leeds have taken on the challenge of making self-driving cars more pedestrian-friendly by teaching them about how people think about crossing the road using Virtual Reality (VR) tech.
The team is aiming to use neuroscientific theories about how our brains make decisions and apply them to automated vehicle technology.
The researchers focused specifically on a decision-making model known as ‘drift diffusion’.
Drift diffusion models assume that people reach decisions after the accumulation of sensory evidence up to a threshold at which the decision is made.
By teaching self-driving cars about this theory, the researchers hope that it will be able to predict if the pedestrian planned to cross the road or wait for the car to pass.
If the autonomous vehicle could make such a prediction it would be able to communicate its intentions more effectively with pedestrians and decrease the chances of running them over.
Professor Gustav Markkula, from the University of Leeds’ Institute for Transport Studies and the senior author of the study, said: “When making the decision to cross, pedestrians seem to be adding up lots of different sources of evidence, not only relating to the vehicle’s distance and speed but also using communicative cues from the vehicle in terms of deceleration and headlight flashes.”

He added: “When a vehicle is giving way, pedestrians will often feel quite uncertain about whether the car is actually yielding, and will often end up waiting until the car has almost come to a full stop before starting to cross.”
Markkula explained that their model allows uncertainty to be limited by teaching automated vehicles about how pedestrians behave, which in turn improves safety and traffic flow.
He said: “It is exciting to see that these theories from cognitive neuroscience can be brought into this type of real-world context and find an applied use.”
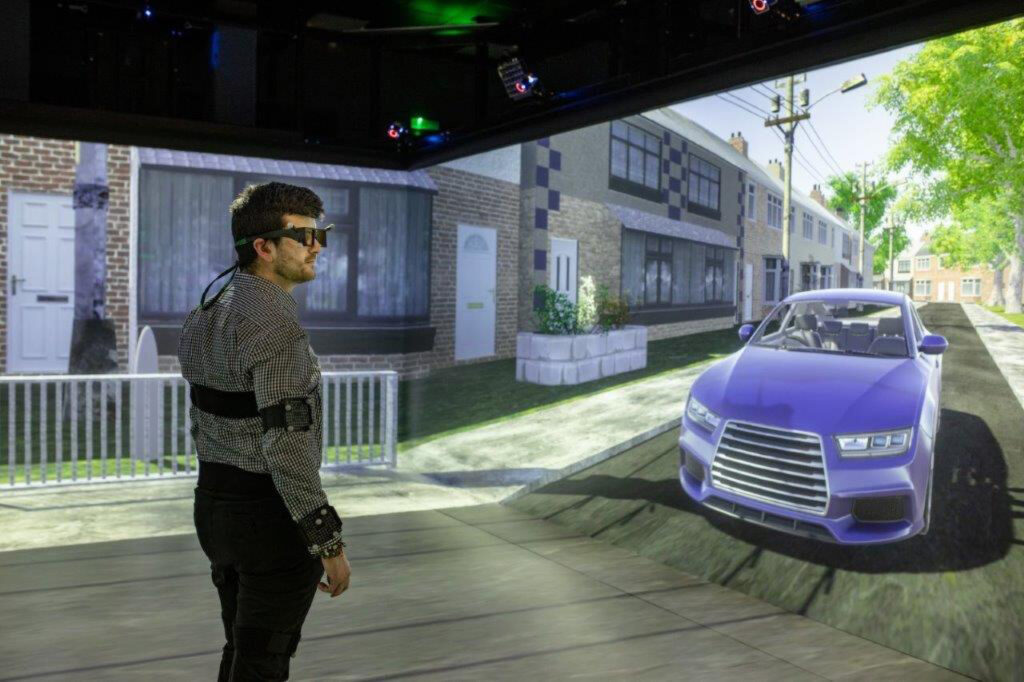
The team used virtual reality to test their model placing participants in a variety of crossing scenarios at the University of Leeds’ unique HIKER (Highly Immersive Kinematic Experimental Research) simulator.
The participants, some of whom can be seen in the images, were asked to walk freely around the simulated environment where a car was coming directly towards them.
The participants were asked to cross the road the moment that they felt it was safe.
Different scenarios were tested, with the approaching vehicle either maintaining the same speed or decelerating to let the pedestrian cross, sometimes also flashing the headlights, representing a commonly used signal for yielding intentions in the UK.
As the researchers had predicted the pedestrians made their decision on when to cross based on several factors including the sensory data from vehicle distance, speed, acceleration, as well as communicative cues.
The drift-diffusion model was able to predict if and when the pedestrian was likely to cross the road.
Markkula said: “These findings can help provide a better understanding of human behaviour in traffic, which is needed both to improve traffic safety and to develop automated vehicles that can coexist with human road users. “

“Safe and human-acceptable interaction with pedestrians is a major challenge for developers of automated vehicles, and a better understanding of how pedestrians behave will be key to enable this.”
Dr Jami Pekkanen, who also contributed to the study, said: “Predicting pedestrian decisions and uncertainty can be used to optimise when, and how, the vehicle should decelerate and signal to communicate that it’s safe to cross, saving time and effort for both.”
The researchers hope that their findings will help make self-driving vehicles safer and more efficient.
The study titled ‘Variable-drift diffusion models of pedestrian road-crossing decisions’ was published in the journal Computational Brain & Behavior on 5th October.